Жесткие тела
Одним из возможных видов полисвязей является случай, когда перемещения
некоторых узлов системы связаны друг с другом так, как в случае их объединения
абсолютно жестким (твердым) телом. В комплексе SCAD
абсолютно жесткое тело рассматривается как некоторый специфический тип
конечного элемента. С конечным элементом его роднит хотя бы то, что абсолютно
жесткое тело объединяет инцидентные этому телу узлы. Грубо говоря, абсолютно
жесткое тело может рассматриваться как предельный случай некоторого конечного
элемента при устремлении жесткостных характеристик этого элемента к бесконечности.
Жесткое тело можно представить наглядно в виде «паука», состоящего из
одного ведущего узла (master node) и множества ведомых узлов (slave nodes)
– рис. 1. Различают полное связывание и частичное.
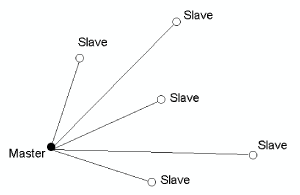
Рис. 1 |
Нам понадобится различать линейные и угловые компоненты
вектора узловых перемещений Z. Первые
будем обозначать через υ,
вторые — через θ.
При полном связывании все перемещения ведомых узлов выражаются
через перемещения ведущего узла на основании теорем кинематики
абсолютно твердого тела:
\[ \left( {{\begin{array}{*{20}c}
{{\rm {\bf u}}_{S} } \\ {{\rm {\bf \theta }}_{S} } \\
\end{array} }} \right)=\left( {{\begin{array}{*{20}c}
{{\rm {\bf u}}_{M} +{\rm {\bf \theta }}_{M} \times {\rm
{\bf \rho }}_{M-S} } \\ {{\rm {\bf \theta }}_{M} } \\
\end{array} }} \right), \] |
(11) |
|
где υ, θ –
векторы поступательных перемещений и углов поворота узла в глобальной
системе координат, причем индексы M и S означают соответственно master
и slave;
ρM-S
– радиус-вектор, соединяющий ведущий узел с ведомым.
При частичном связывании выражение (11) охватывает только те степени
свободы, которые удовлетворяют соотношениям кинематики абсолютно твердого
тела. Остальные перемещения и углы поворота каждого из ведомых узлов остаются
независимыми и не выражаются через перемещения ведущего узла. Такое связывание
можно представить как связывание в два этапа. На первом этапе производится
полное связывание перемещений и углов поворота всех ведомых узлов с перемещениями
и углами поворота ведущего узла, а затем выполняется отсоединение независимых
степеней свободы ведомых узлов.
Поскольку в уравнения (11) входит угол поворота мастер-узла, то при
использовании жестких тел необходимо использовать только те типы расчетных
схем, степени свободы которых содержат углы поворота (тип 2, тип 3 и тип
5). Если в других узлах отсутствуют углы поворота из-за выбора соответствующих
типов конечных элементов, то рекомендуется наложить недостающие связи.
Для удобства задания вида связывания вводятся коды связывания. Для пространственной
расчетной модели коды связывания имеют вид X,
Y, Z, UX, UY, UZ.
Каждый из этих параметров принимает значение f или b. Значение b (blocked)
означает, что связывание перемещений, отвечающих данной степени свободы
(в глобальной системе координат), производится, а значение f (free) –
не производится.
Возможны следующие варианты набора узловых перемещений в коде связывания:
- пространственная расчетная модель – коды связывания X, X,
Y, Z, UX, UY, UZ;
- плоская рама – коды связывания X,
Z, UY (этот
тип жесткого тела навязывает перемещения ведомым узлам в
плоскости самого жесткого тела, такое абсолютно жесткое тело можно
называть диском);
- изгибаемая пластина, расположенная в плоскости XOY – коды связывания
Z, UX, UY.
(этот тип жесткого тела, который можно назвать штамп,
связывает перемещения принадлежащих ему узлов при выходе их из плоскости
жесткого тела).
Надо сказать, что, с одной стороны, жесткие тела (да и вообще полисвязи)
представляют собой исключительно мощный инструмент формирования расчетных
схем, позволяющий пользователю проявлять свою индивидуальную изобретательность
в самых нестандартных ситуациях. С другой стороны, это и небезопасный
инструмент — даже опытные расчетчики могут попасть в хорошо закамуфлированную
и потому трудную для обнаружения ловушку. Одной из таких ловушек является
условие линейной независимости. Это означает, что расчетная схема не должна
содержать статически неопределимую подсистему, целиком состоящую из абсолютно
жестких элементов. В противном случае распределение усилий в системе не
единственно.
Рассмотрим несколько характерных примеров использования абсолютно твердых
тел. На рис. 2,а показана конструкция мощной плиты, подкрепленной широкими
ребрами. Для такой конструкции использование традиционных приемов моделирования
с помощью жестких вставок приведет к тому, что изгиб плиты в пролете между
подкрепляющими ребрами будет заметно большим, чем в том случае, когда
учитывается сокращение пролета плиты за счет ширины ребра.
Использование в модели абсолютно жестких тел (они на рисунке условно
ограничены пунктирной линией) позволяет прикрепить стержень с необходимым
эксцентриситетом к узлам на срединной поверхности пластины, а также обеспечить
неискажаемость сечения в месте соединения с пластиной, что исключает ее
изгиб на этом участке. Заметим, что в данном случае уместно использовать
пространственное жесткое тело, несмотря на то, что все его узлы лежат
в одной плоскости.
Неискажаемость контура поперечного сечения в схемах, составленных из
тонкостенных стержней, часто реализуется за счет устройства диафрагм или
аналогичных им элементов жесткости. Если такие элементы не нагружены и
их напряженное состояние расчетчика не интересует, то диафрагмы можно
моделировать абсолютно жесткими телами, не допускающими деформаций в своей
плоскости.

Рис. 2. Моделирование
широкого ребра абсолютно жесткими телами
На рис. 3 показан пример сопряжения пластин разной толщины с выравниванием
одной из поверхностей. Здесь целесообразно использовать абсолютно жесткое
тело, содержащее расположенные вдоль линии изменения толщины пары узлов,
примыкающие к различным срединным поверхностям пластин.
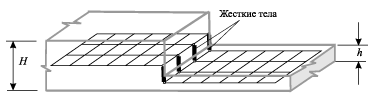
Рис. 3. Моделирование
несоосного скачка толщин
Заметим, что если просто воспользоваться объединением перемещений верхних
и нижних узлов, то не удается правильно описать особенности работы такого
сопряжения, поскольку тангенциальное перемещение верхнего узла определяется
не только тангенциальным перемещением нижнего узла, но и его углом поворота.
Этот же прием можно применить и в том случае, когда ступень между верхней
и нижней пластинами образуется балкой (рис. 4). Здесь используются трехузловые
жесткие тела, к среднему узлу которых прикрепляется стержневой элемент,
моделирующий балку.
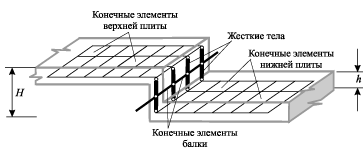
Рис. 4. Моделирование
ступени
Возвращаясь к сопряжению пластин разной толщины с выравниванием одной
из поверхностей, следует заметить, что прием использования абсолютно жестких
тел предусматривает расположение узлов частей плиты с различной толщиной
на разных уровнях, а это не всегда может быть удобным. Можно все узлы
расположить на одном уровне и воспользоваться опцией «смещение срединной
плоскости пластин», что тоже приведет к нужному эффекту.
Характерным примером использования абсолютно жестких тел является моделирование
области сопряжения монолитных колонны и перекрытия (рис. 5). Габариты
жесткого тела в этом случае соответствуют размерам сечения колонны. Заметим,
что в препроцессоре ФОРУМ предусмотрен
автоматический ввод жестких тел в область сопряжения.
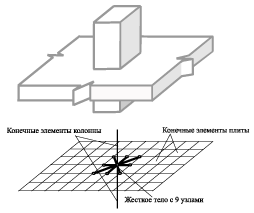
Рис. 5. Моделирование
области сопряжения плиты и колонны