Principal and Equivalent Stresses
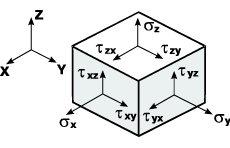
Figure 1. Stress
components
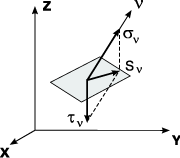
Figure 2. Stresses
on an arbitrary plane |
Let’s outline the fundamental principles of the stress theory
usually considered in the course of the theory of elasticity or
the strength of materials.
If you select an elementary volume in the form of an infinitesimally
small parallelepiped from the body in the vicinity of a certain
point (Fig.1), the environmental action on it can be replaced
by the stresses the components of which act on the faces of the
parallelepiped.
According to the law of pairing
of shear stresses
| \[ \tau_{xy} =\tau_{yx} , \quad \tau_{yz} =\tau_{zy}
, \quad \tau_{zx} =\tau_{xz} . \] |
(1) |
In the general case there are only six independent stress components
in a point which form a symmetric stress
tensor
| \[ T_{\sigma } =\left[ {{\begin{array}{*{20}c} {\sigma_{x}
} & {\tau_{xy} } & {\tau_{xz} } \\ {\tau_{xy}
} & {\sigma_{y} } & {\tau_{yz} } \\ {\tau_{xz}
} & {\tau_{yz} } & {\sigma_{z} } \\ \end{array}
}} \right]. \] |
(2) |
Normal stress σν and shear stress τν (Fig.
2) with the resultant Sν
act on an arbitrarily oriented plane passing through the same
point the normal to which ν has direction cosines l,
m, n
with the axes x, y, z. The projections of this resultant on the
coordinate axes Sνx,
Sνy, Sνz are related
to the stress components by the equilibrium conditions (Cauchy’s
formula):
| \[ \left. {\begin{array}{l} S_{\nu x} =\sigma_{x} l+\tau_{xy}
m+\tau_{xz} n \\ S_{\nu y} =\tau_{xy} l+\sigma_{y} m+\tau_{yz}
n \\ S_{\nu z} =\tau_{xz} l+\tau_{yz} m+\sigma_{z} n \\
\end{array}} \right\} \] |
(3) |
|
There are such three mutually perpendicular planes on which there are
no shear stresses. Principal stresses σ1, σ2 and
σ3 (σ1 ≥ σ2 ≥ σ3) act on these
so-called principal planes. It is also known that the principal stresses
have extreme properties, i.e. the resulting stress on any plane Sν ≤ σ1 and
Sν ≥ σ3.
The direction cosines lk,
mk and nk
of the normals to the principal planes νk are determined by
solving the system of equations:
| \[ \left\{ {\begin{array}{l} (\sigma_{x} -\sigma_{k} )l_{k}
+\tau_{xy} m_{k} +\tau_{xz} n_{k} =0; \\ \tau_{xy} l_{k} +(\sigma_{y}
-\sigma_{k} )m_{k} +\tau_{yz} n_{k} =0; \\ \tau_{xz} l_{k} +\tau_{yz}
m_{k} +(\sigma_{z} -\sigma_{k} )n_{k} =0; \\ \end{array}} \right.
\] |
(4) |
a nonzero solution of which exists when its determinant is equal to
zero.
And \( l_{k}^{2} +m_{k}^{2} +n_{k}^{2} =1 \).
It follows from (4) that the principal stresses σk(k=1,2,3)
are the roots of the cubic equation
| \[ det\left[ {{\begin{array}{*{20}c} {\sigma_{x} -\sigma }
& {\tau_{xy} } & {\tau_{xz} } \\ {\tau_{xy} } & {\sigma_{y}
-\sigma } & {\tau_{yz} } \\ {\tau_{xz} } & {\tau_{yz}
} & {\sigma_{z} -\sigma } \\ \end{array} }} \right]=0. \] |
(5) |
Expanded form of the equation (5):
| \[ \sigma^{3}-I_{1} (T_{\sigma } )\sigma^{2}-I_{2} (T_{\sigma
} )\sigma -I_{3} (T_{\sigma } )=0, \] |
(6) |
Its coefficients are invariants (i.e. they do not depend on the selected
coordinate system). The first invariant \( I_{1} (T_{\sigma } )=\sigma_{x}
+\sigma_{y} +\sigma_{z} \) is equal to three times the average stress
(hydrostatic pressure) σ0.
The direction of the principal planes can be defined not only by the
nine direction cosines but also by the three Euler angles (precession
angle ψ, nutation angle θ and the pure rotation angle φ). Any plane parallel
to the coordinate plane (XOY, XOZ or YOZ) can be set to any position with
their help.
The Lode-Nadai coefficient is used to characterize the stress-strain
state (SSS).
\[ \mu_{0} =2\frac{\sigma_{2} -\sigma_{3} }{\sigma_{1} -\sigma_{3} }-1,
\]
It takes values μ0 = 1 at pure compression, μ0
= 0 at pure shear, μ0= -1 at pure tension.
When outputting the results of the calculation the stress tensor (2)
in the general case has the following form
| \[ T_{\sigma } =\left[ {{\begin{array}{*{20}c} {\sigma_{x}
} & {T_{xy} } & {T_{xz} } \\ {T_{xy} } & {\sigma_{y}
} & {T_{yz} } \\ {T_{xz} } & {T_{yz} } & {\sigma_{z}
} \\ \end{array} }} \right] \] |
(7) |