Неоднородное демпфирование
Цель: сравнение решения задачи (рис. 1) методом Ньюмарка (программный комплекс SCAD) с численным решением, полученном в MathCAD.
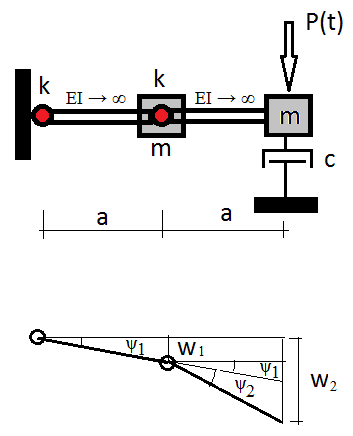
Рис. 1. Два абсолютно твердых невесомых тела соединены между собой и с жесткой опорой пружинами жесткостью k. Инерционные характеристики системы представлены сосредоточенными массами m. Локальный демпфер с коэффициентом демпфирования c соединяет крайнюю массу с опорой.
Имя файлов с исходными данными:
Test_local_damping.SPR - расчетная схема
TimeHist_1.txt - функция времени
local_damping.xmcd - файл MathCAD
Конечноэлементная модель: Расчетная схема – система общего вида, два конечных элемента упругой связи (тип 55), два конечных элемента абсолютно твердого тела (тип 100) и один одноузловой демпфер (тип 56). Количество узлов в расчетной схеме – 5. При расчете используется матрица сосредоточенных масс.
Описание решения:
На рис. 1 (низ) представлена деформированная схема, из которой вытекают следующие кинематические соотношения:
| \[ \psi_{1} =\frac{w_{1} }{a};\quad \psi_{2} =\frac{w_{2} -w_{1} }{a}-\psi _{1} =\frac{w_{2} -2w_{1} }{a} \] | (1) |
Здесь w1, w2 – нормальные прогибы, а ψ1, ψ2 – углы перекосов абсолютно жестких стержней. Полная потенциальная энергия системы представлена в виде
| \[ Э=П+W=\frac{1}{2}k\psi_{1}^{2} +\frac{1}{2}k\psi_{2}^{2} -P w_{2} \] | (2) |
где П и W – потенциальная энергия упругих деформаций и изменение потенциала внешних сил. Кинетическая энергия системы Т приведена ниже:
| \[ T=\frac{1}{2}m\dot{{w}}_{1}^{2} +\frac{1}{2}m\dot{{w}}_{2}^{2} \] | (3) |
Применяя вариационный принцип Гамильтона
| \[ \delta \int\limits_{t1}^{t2} {Ldt=0} \] | (4) |
где L = T – Э, и добавляя в полученные уравнения движения силы вязкого трения, приходим к следующим уравнениям движения:
| \[ {\rm {\bf M\ddot{{x}}}}+{\rm {\bf C\dot{{x}}}}+{\rm {\bf Kx}}={\rm {\bf p}}\left( t \right) \] | (5) |
где
| \[ {\rm {\bf M}}=\left( {{\begin{array}{*{20}c} m & 0 \\ 0 & m \\ \end{array} }} \right),\quad {\rm {\bf C}}=\left( {{\begin{array}{*{20}c} 0 & 0 \\ 0 & c \\ \end{array} }} \right),\quad {\rm {\bf K}}=\frac{k}{a^{2}}\left( {{\begin{array}{*{20}c} 5 & {-2} \\ {-2} & 1 \\ \end{array} }} \right),\quad {\rm {\bf x}}=\left( {{\begin{array}{*{20}c} {w_{1} } \\ {w_{2} } \\ \end{array} }} \right),\quad {\rm {\bf p}}\left( t \right)=\left( {{\begin{array}{*{20}c} 0 \\ {P\left( t \right)} \\ \end{array} }} \right) \] | (6) |
Система уравнений (5) решается с помощью MathCAD при использовании процедуры rkfixed, реализующей метод Рунге-Кутта четвертого порядка точности. Функция P(t) задается следующим алгоритмом:
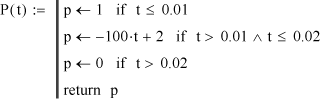 |
(7) |
Интервал интегрирования принимается равным t ∈ [0, 1], a = 1 м, k = 1000 МН∙м/рад, m = 106 кг, c = 10 МН∙с/м, а количество точек аппроксимации искомой функции npoint = 1000. Метод Рунге-Кутта относится к явным методам интегрирования, следовательно, он условно устойчив. При npoint = 10 наблюдается неустойчивое поведение решения, результаты при npoint = 100 и npoint = 1000 немного отличаются на правом конце интервала, а результаты при npoint = 1000 и npoint = 10000 практически совпадают. Поэтому мы считаем, что численное решение при npoint = 1000 приводит к практически точным результатам.
На рис. 2 изображена расчетная модель SCAD, а на рис. 4 показано сопоставление приведенного выше решения с результатами, полученными методом Ньюмарка (расчетный комплекс SCAD). При использовании метода Ньюмарка шаг интегрирования принимался равным Δt = 0.0001 с.
На рис. 3 представлена зависимость нагрузки от времени, соответствующая (7).

Рис. 2. Расчетная модель SCAD
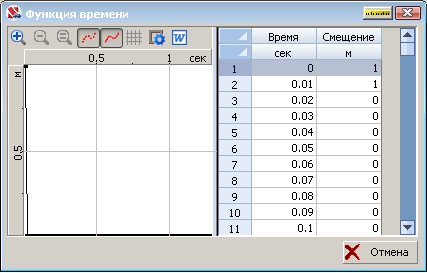
Рис. 3. Зависимость нагрузки от времени

Рис. 4. Вертикальное перемещение края консоли
В момент времени t = 0.1 c перемещение края консоли достигает значения, близкого к наибольшему по абсолютной величине, причем перемещение, полученное по MathCAD, равно w2 = – 6.5393∙10–4 (рис. 1), а перемещение, полученное методом Ньюмарка, равно w3 = – 6.5170∙10–4 (рис. 3).
Таким образом, результаты численных решений, полученных в MathCAD и методом Ньюмарка (SCAD), практически совпадают, что подтверждает достоверность обеих представленных методов.