Деформированное состояние разрезного кругового кольца, нагруженного двумя взаимно перпендикулярными силами Px и Py, лежащими в плоскости оси кольца

Цель: Деформированное состояние разрезного кругового кольца при изгибе в плоскости без учета деформаций поперечного сдвига.
Файл с исходными данными: 4_6.spr
Формулировка задачи: Разрезное круговое кольцо нагружается двумя взаимно перпендикулярными силами Px и Py, лежащими в плоскости оси кольца. Определить деформированное состояние кольца.
Ссылки: Расчеты на прочность в машиностроении / Пономарев С.Д., Бидерман В.Л., Лихарев К.К. и др. В трех томах. Том 1. М.: Машгиз, 1956.
Исходные данные:
| E = 2.0·1011 Па | - модуль упругости; |
| R = 1.3 м | - радиус оси кольца; |
| F = 1·10-2 м2 | - площадь поперечного сечения; |
| I = 5·10-6 м4 | - момент инерции поперечного сечения; |
| Px = Py = 1 кН | - значение сосредоточенной силы. |
Конечноэлементная модель: Расчетная схема – плоская схема, 120 стержневых элементов типа 2, 121 узел.
Результаты решения в SCAD
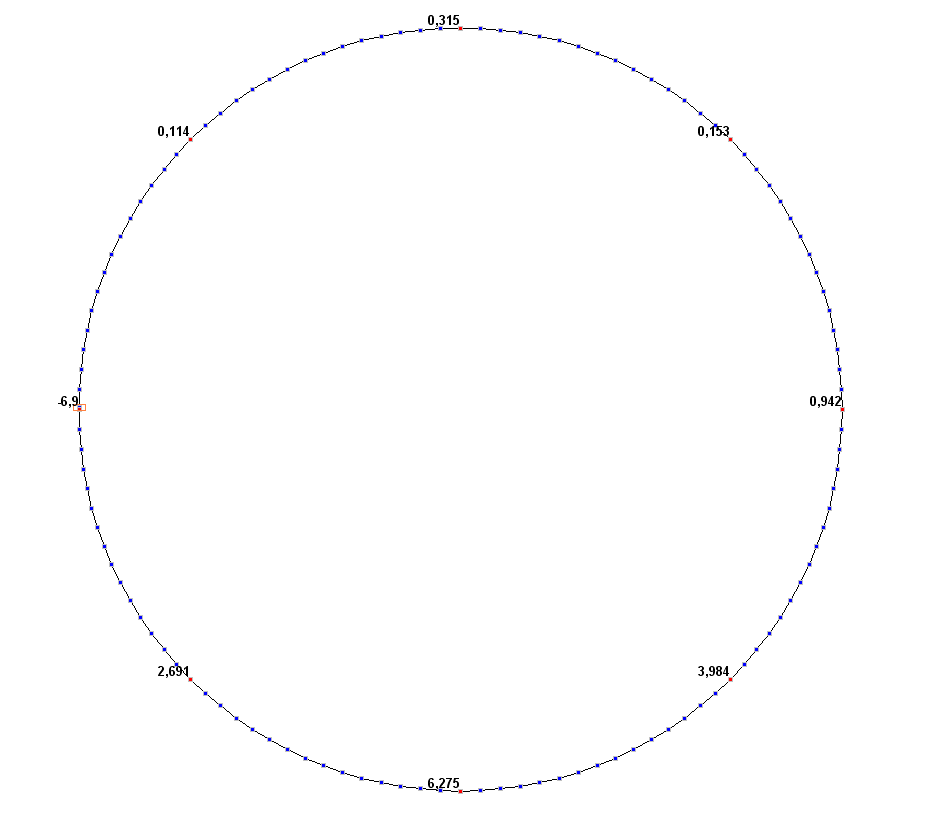
Значения перемещений u (мм)
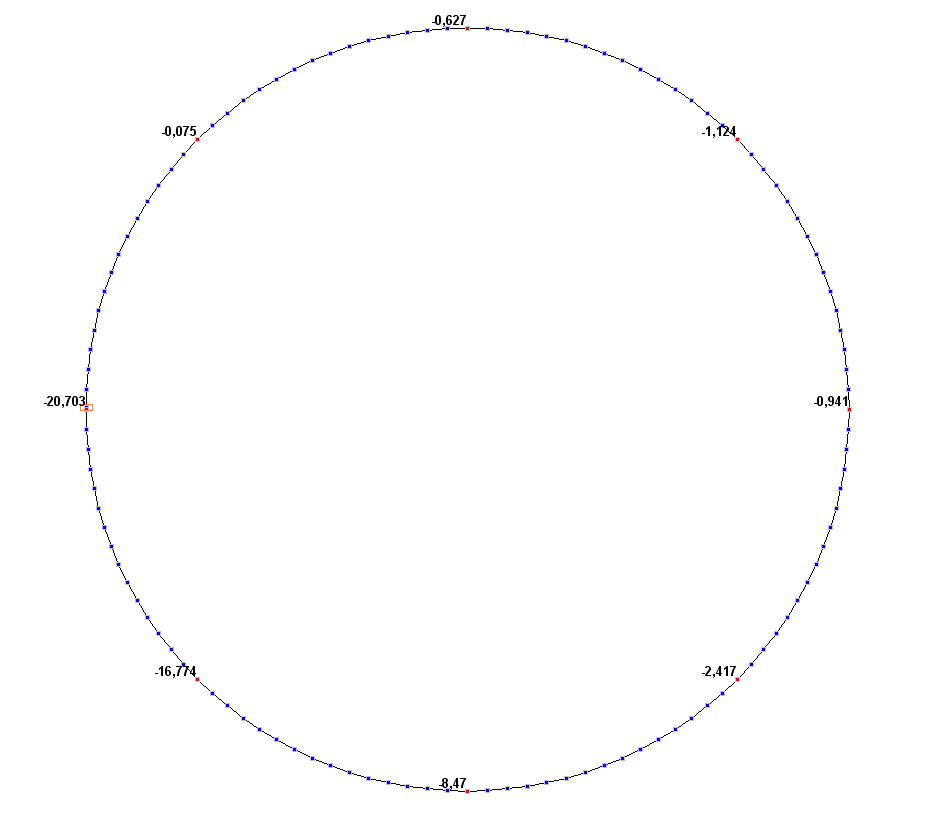
Значения перемещений v (мм)
Сравнение решений:
|
Угол φ, град |
Перемещения вдоль оси х |
Перемещения вдоль оси y |
||||
|---|---|---|---|---|---|---|
|
Теория |
SCAD |
Отклонения, % |
Теория |
SCAD |
Отклонения, % |
|
|
0 |
-6.902 |
-6.900 |
0.03 |
-20.706 |
-20.703 |
0.01 |
|
45 |
2.690 |
2.691 |
0.04 |
-16.777 |
-16.774 |
0.02 |
|
90 |
6.275 |
6.275 |
0.00 |
-8.472 |
-8.470 |
0.02 |
|
135 |
3.984 |
3.984 |
0.00 |
-2.419 |
-2.417 |
0.08 |
|
180 |
0.943 |
0.942 |
0.11 |
-0.943 |
-0.941 |
0.21 |
|
225 |
0.154 |
0.153 |
0.65 |
-1.125 |
-1.124 |
0.09 |
|
270 |
0.316 |
0.315 |
0.32 |
-0.627 |
-0.627 |
0.00 |
|
315 |
0.114 |
0.114 |
0.00 |
-0.074 |
-0.075 |
1.35 |
|
360 |
0.000 |
0.000 |
0.00 |
0.000 |
0.000 |
0.00 |
Замечания: При аналитическом решении перемещения точек кольца в направлениях x и y определяются по формулам:
\[ u\left( \phi \right)=\frac{P_{x} \cdot R^{3}}{E\cdot I}\cdot \beta_{1} \left( \phi \right)+\frac{P_{y} \cdot R^{3}}{E\cdot I}\cdot \beta_{2} \left( \phi \right), \] где: \[ \beta_{1} \left( \phi \right)=-0.5\cdot \left( {2\cdot \pi -\phi } \right)-\sin \left( \phi \right)+0.5\cdot \sin \left( \phi \right)\cdot \cos \left( \phi \right); \] \[ \beta_{2} \left( \phi \right)=1+\left( {2\cdot \pi -\phi } \right)\cdot \sin \left( \phi \right)-\cos \left( \phi \right)+0.5\cdot \sin^{2}\left( \phi \right); \] \[ v\left( \phi \right)=\frac{P_{x} \cdot R^{3}}{E\cdot I}\cdot \gamma_{1} \left( \phi \right)+\frac{P_{y} \cdot R^{3}}{E\cdot I}\cdot \gamma_{2} \left( \phi \right), \] где: \[ \gamma_{1} \left( \phi \right)=-1+\cos \left( \phi \right)+0.5\cdot \sin ^{2}\left( \phi \right); \] \[ \gamma_{2} \left( \phi \right)=-0.5\cdot \left( {2\cdot \pi -\phi } \right)-\left( {2\cdot \pi -\phi } \right)\cdot \cos \left( \phi \right)-\sin \left( \phi \right)-0.5\cdot \sin \left( \phi \right)\cdot \cos \left( \phi \right). \]